面向柔性精准装配任务的工业机器人三维视觉感知理论与实现方法
项目简介
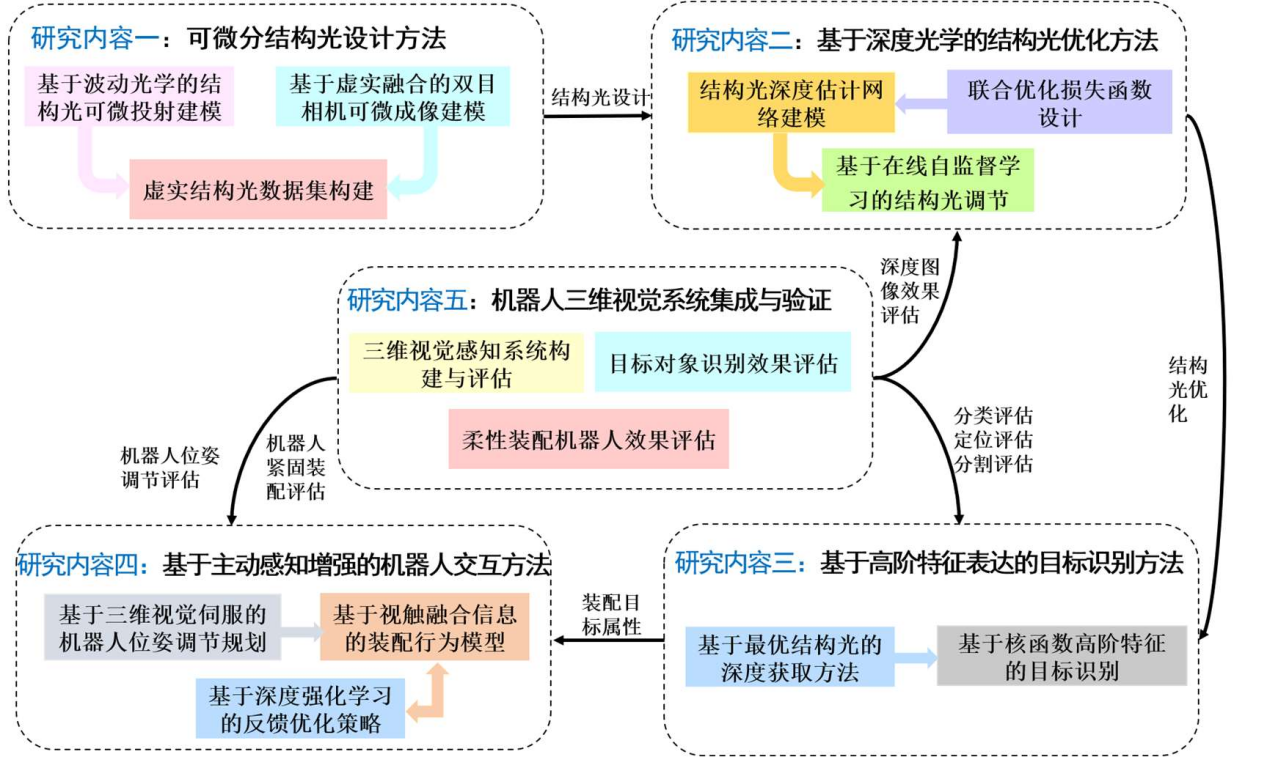
工业机器人柔性装配符合机器替人与用户个人定制的产业变革趋势,是中国制造业转型升级的迫切需求。三维主动视觉感知是柔性装配关键环节,有利于打通机器人感知引导行为以及行为增强感知的闭环通路,提高柔性装配的精度与鲁棒性。结构光技术现已成为工业机器人三维视觉主流,但多集中于对固定结构光的研究,已无法适应柔性装配模式导致的复杂环境变化的影响。究其原因,主要是三维主动感知全栈反馈机制这一核心科学问题尚未被突破。本项目围绕联合基金“可变环境下三维主动视觉精准感知”目标,对结构光成像模型可微性、结构光与目标环境联合优化、复杂任务驱动下机器人感知与行为交互机制等关键科学问题展开深入研究。提出可微分结构光设计方法、基于深度光学的结构光优化方法、基于可变环境高阶特征表达的深度图像识别方法、基于主动感知增强的机器人交互方法,并开展三维视觉系统集成及验证研究。项目将为工业机器人柔性精准装配提供理论方法和关键技术支撑
研究内容