自适应环境结构光生成方法研究
项目简介
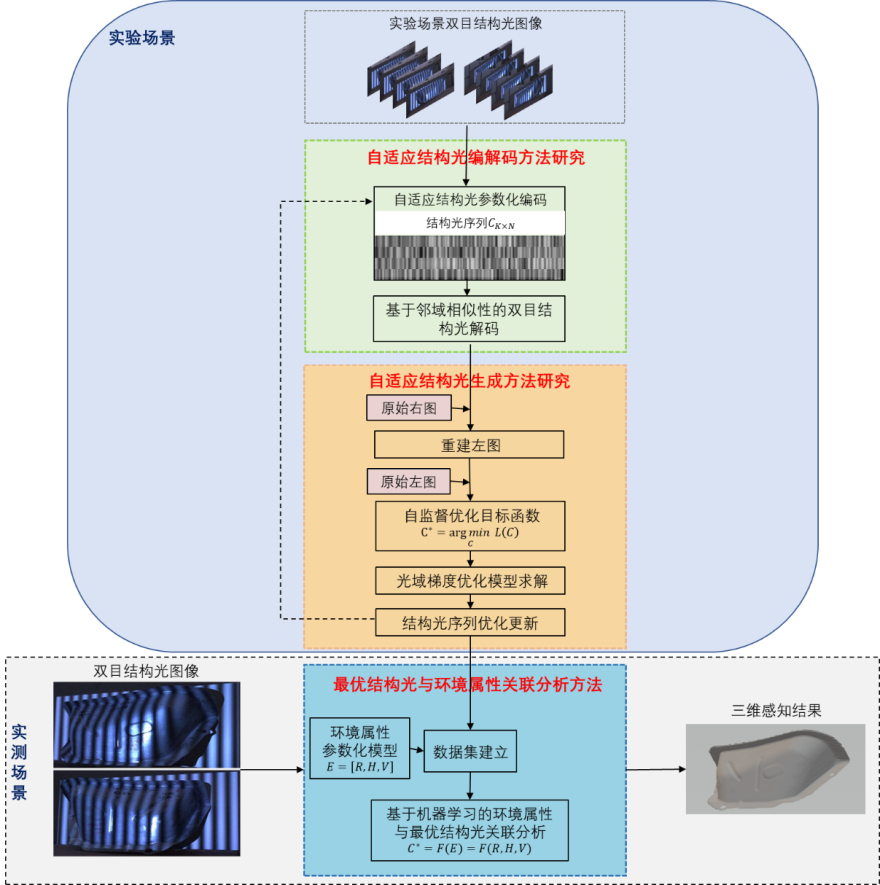
结构光技术是工业机器人三维视觉感知的重要手段,已经在物体柔性定位、引导机器人快速抓取、三维尺寸测量等方面获得了广泛的研究与应用。现有方法多集中于对固定结构光的研究与应用,已无法适应小批量、个性化等柔性生产模式产生的复杂工业环境变化的影响。为此,本项目融合主动视觉、双目立体、机器学习等领域,探索结构光模型适应环境变化的机制,力争实现机器人高精度、高鲁棒、快速的三维视觉感知。项目围绕自适应结构光编解码、自适应结构光生成、环境属性与最优结构光关联分析三个方面开展研究,重点解决结构光参数化编码、基于邻域相似性的双目结构光解码、自监督优化目标函数设计、基于光域梯度的优化模型求解、基于机器学习的环境属性与最优结构光关联分析等关键技术难题。项目从制约机器人视觉感知能力的技术瓶颈中凝炼科学问题,预期研究成果将作为一种新型结构光传感器突破制约产业发展的关键技术,推动相应领域的理论发展与市场应用
研究内容