Multi-state objects depth acquisition based on binocular structured light
Abstract
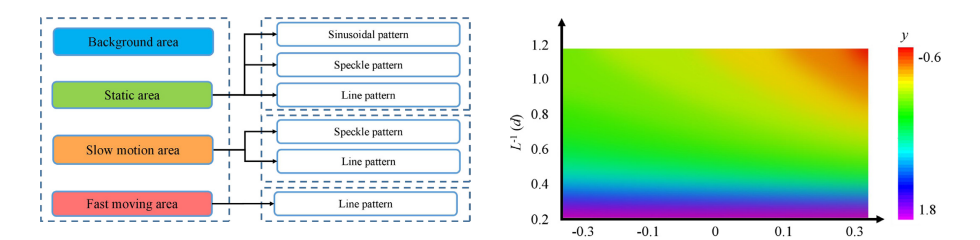
三维深度感知技术因其鲁棒性、高精度和高密度而得到了广泛的研究和发展。然而,当前结构光技术在获取不同运动状态下的物体场景深度图时,仍面临保持高精度和高分辨率的研究难题。本文设计了一种用于多状态目标深度获取的新算法。基于正弦、散斑和线条图案设计了一种新型投影图案。利用背景分割技术将前景目标分离,并将不同运动状态的区域划分为静态、慢速运动或快速运动区域。然后,根据不同的运动状态选择相应的图案解码方案。在实验中,我们的技术成功计算出了多状态物体的深度
Method